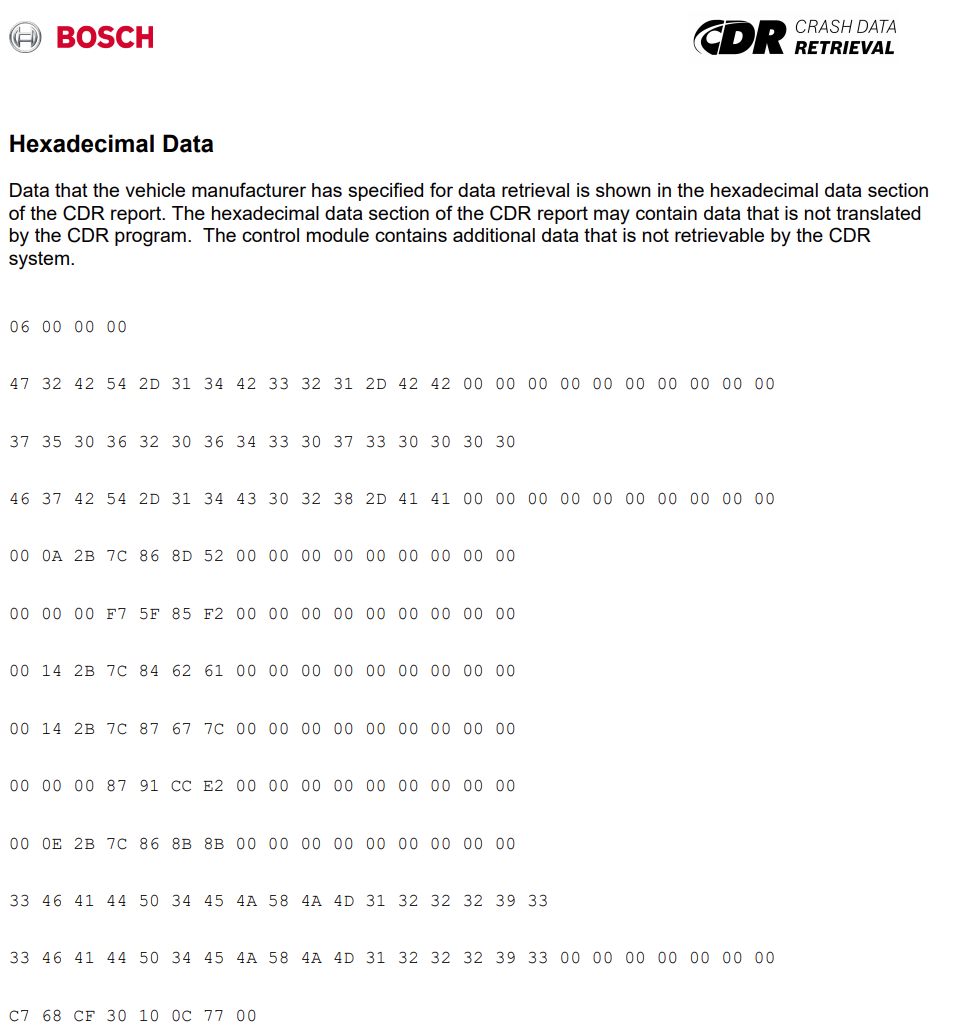
Jestem praktykiem, posiadam wieloletnią praktykę w naprawie i diagnostyce pojazdów. Wiedzę dotyczącą montażu, diagnostyki samochodów osobowych nabyłem podczas pracy na montażu samochodów w Fabryce Samochodów Małolitrażowych w Bielsku Białej oraz w Fabryce Samochodów Osobowych Warszawa Żerań. Następnie pracowałem przy naprawie samochodów osobowych w Wojewódzkiej Kolumnie Transportu Sanitarnego w Bielsku Białej dysponując najbardziej nowoczesnymi urządzeniami diagnostycznymi. Studenci Politechniki Łódzkiej w ramach wycieczki przyglądali się diagnostyce pojazdów wykonywanej przez podległych mi pracowników. Wiedzę dotyczącą naprawy ciągników rolniczych, kombajnów rolniczych, przyczep nabyłem podczas pracy przy ich naprawie w Państwowym Ośrodku Maszynowym w Okrajniku. Wiedzę dotyczącą naprawy, a zarazem diagnostyki samochodów ciężarowych, naczep, koparek, spycharek, ładowarek i autobusów pracując w Zakładzie Transportu KBK oraz PKS Żywiec. W PKS Żywiec podlegała mi stacja diagnostyczna wielokrotnie pokazywana w telewizji jako wzorcowa, a do moich obowiązków należało również ustalanie przyczyn awarii pojazdów, w tym silników, ustalanie przyczyn katastrof, wypadków, kolizji. Wykonywałem oględziny miejsca kolizji, wypadku, katastrofy wraz z Milicją na obszarze działania PKS Żywiec. Milicja miała obowiązek współpracy na miejscu wypadku, katastrofy, kolizji. W przypadku katastrofy, niektórych wypadków sporządzałem zaszyfrowaną notatkę, która specjalną pocztą była natychmiast przekazywana do Ministerstwa Komunikacji do Warszawy. Biuro wykonuje specjalistyczne badania pojazdów, takich jak samochody osobowe, ciężarowe, autobusy, naczepy, przyczepy, ciągniki rolnicze, koparki m.in. za pomocą specjalistycznego sprzętu diagnostycznego. Moje Biuro do rekonstrukcji wypadków stosuje najnowsze techniki przy wykorzystaniu istotnych danych zawartych w elektronice pojazdów. Biuro samodzielnie odczytuje dane z elektroniki pojazdów. Danych zapisanych przez elektronikę pojazdu (szczególnie po wypadku) nie należy z góry przyjmować, jako wiarygodne, wiarygodność tą trzeba zweryfikować. Biuro weryfikuje te dane poprzez fachowe badanie odczytanych danych pojazdu, jak również w oparciu o dane z innego źródła. Podstawową sprawą jest przestrzeganie procedury badania odczytu danych, wiarygodności sygnału komunikacyjnego, czy też sprawności elementu wykonawczego, który te dane przekazuje. Biuro m.in. do tego typu ustaleń wykorzystuje oscyloskop PicoScope 4425A którego oprogramowanie pozwala na ustalenie prawidłowości sygnału komunikacji oraz szereg specjalistycznych badań, w tym badanie samochodów hybrydowych, elektrycznych. Wykonując diagnostykę, odczyt danych szczególnie z pojazdu, który uległ uszkodzeniu – podstawową sprawą jest ustalenie, czy podawane dane są wiarygodne, czy też podają błędy z uwagi na uszkodzenia. Jest to podstawowy element procedury diagnostycznej szczególnie w przypadku samochodu, który uległ uszkodzeniu w czasie wypadku, kolizji. Poniżej pokazano przykład badania danych źródłowych EDR.


Pokazany powyżej przykład badania jest elementarnym sposobem sprawdzania wiarygodności odczytanych danych EDR. Producent programu podaje dane (heksadecymalne) na podstawie, których uzyskano informacje podane w protokole. Operator specjalista z zakresu interpretacji danych EDR ma obowiązek weryfikacji uzyskanych danych (heksadecymalnych) ze sterownika, a więc musi wykonać specjalistyczne badanie danych źródłowych EDR podawanych na końcu protokołu. Badanie wiarygodności danych EDR jest bardzo istotne, a to dlatego, że dane EDR w większości przypadków są zapisywane w sterowniku poduszek. Producent sterowników poduszek nie zezwala na naprawę sterowników poduszek, wymagana jest ich wymiana na nowe. Natomiast w Polsce naprawa sterowników jest wręcz nagminna. W przypadku odczytu danych z EDR ze sterownika poduszek należy najpierw ustalić, czy ten sterownik nie był naprawiany. Jeżeli sterownik poduszek był naprawiany to należy ustalić, czy był naprawiony poprawnie, na co pozwala powyższe badanie.

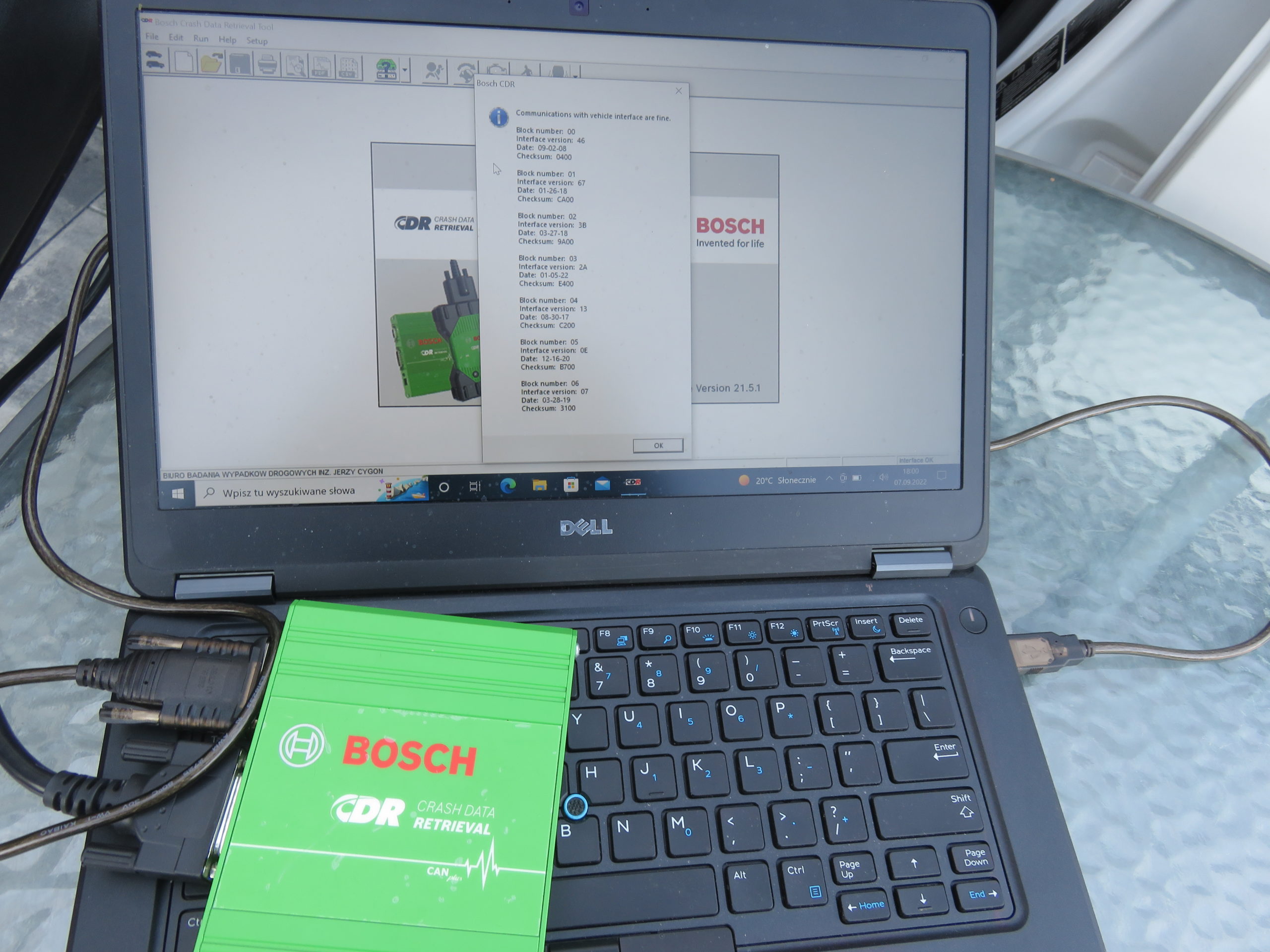
Reasumując, żeby poprawnie odczytać dane z elektroniki trzeba spełnić szereg wymogów. Nie wystarczy jedynie podłączyć urządzenia, nie spełniając warunków wymogów odczytu danych. Dotyczy to również odczytów danych z EDR W przypadku odczytów danych EDR bezpośrednio z samochodu mamy możliwość zbadania prawidłowości sygnału ze sterownika i jest to najczęściej sterownik SRS, jak również sprawności elementów przekazujących dane. Tych możliwości nie ma, jeżeli odczytujemy dane EDR ze sterownika wymontowanego z samochodu, który rozpadł się na kilka części w czasie wypadku, palił się po zdarzeniu, sterownik uległ mechanicznemu uszkodzeniu i wymagane są dodatkowe czynności, aby odczytać dane EDR.



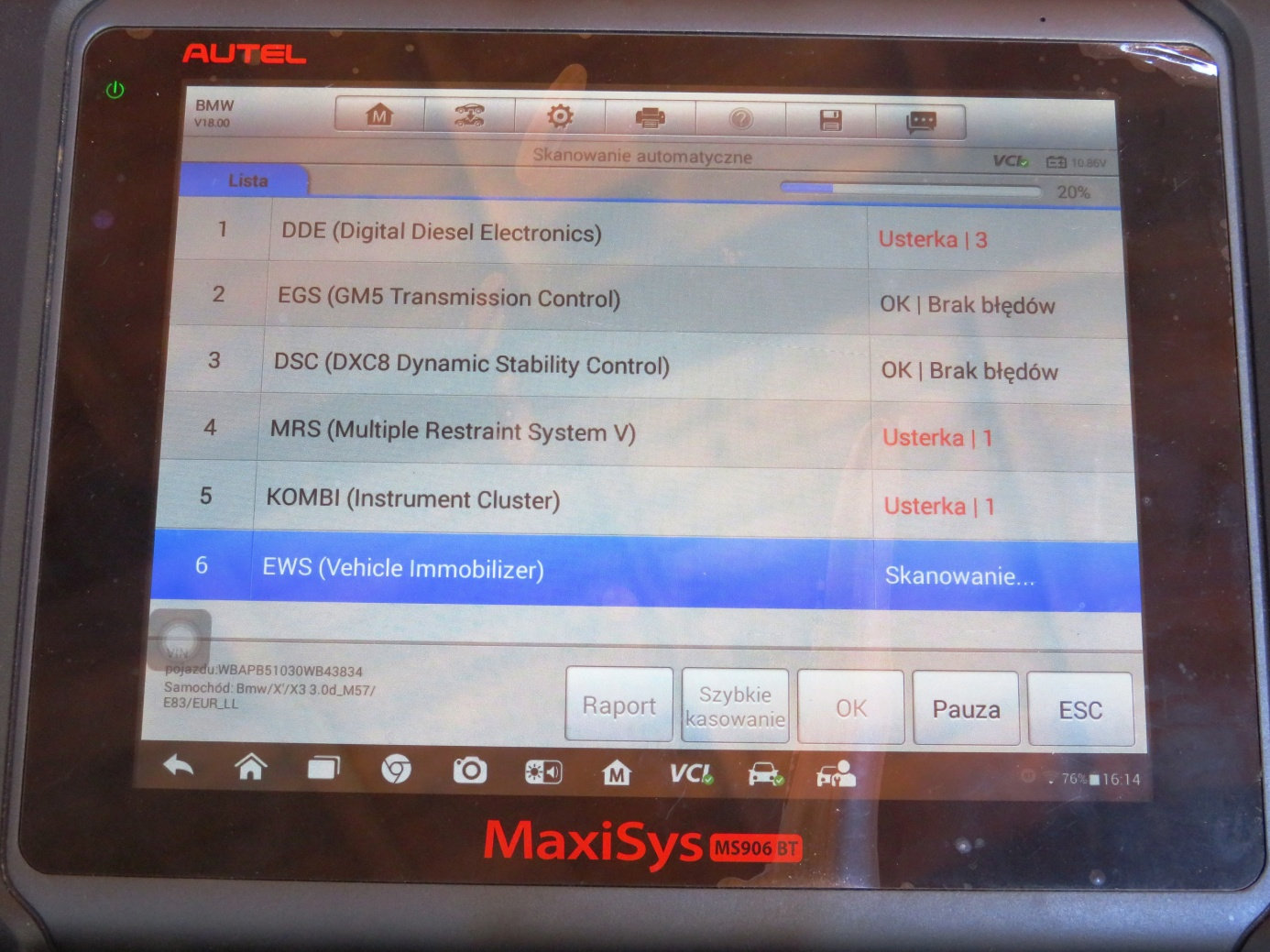


W przedstawionym poniżej przypadku odczyt danych z CAN – danych z zamrożonych ramek kodów błędów był wystarczającą informacją, co do prędkości samochodu w momencie pierwszego zderzenia.

| Wartość RPM silnika | 3912 rpm |
| Czujnik prędkości pojazdu | 134 km/h |
| Czas od uruchomienia silnika | 137 sec |
Odczyt danych z CAN pozwolił w sposób jednoznaczny ustalić faktyczny przebieg zdarzenia.
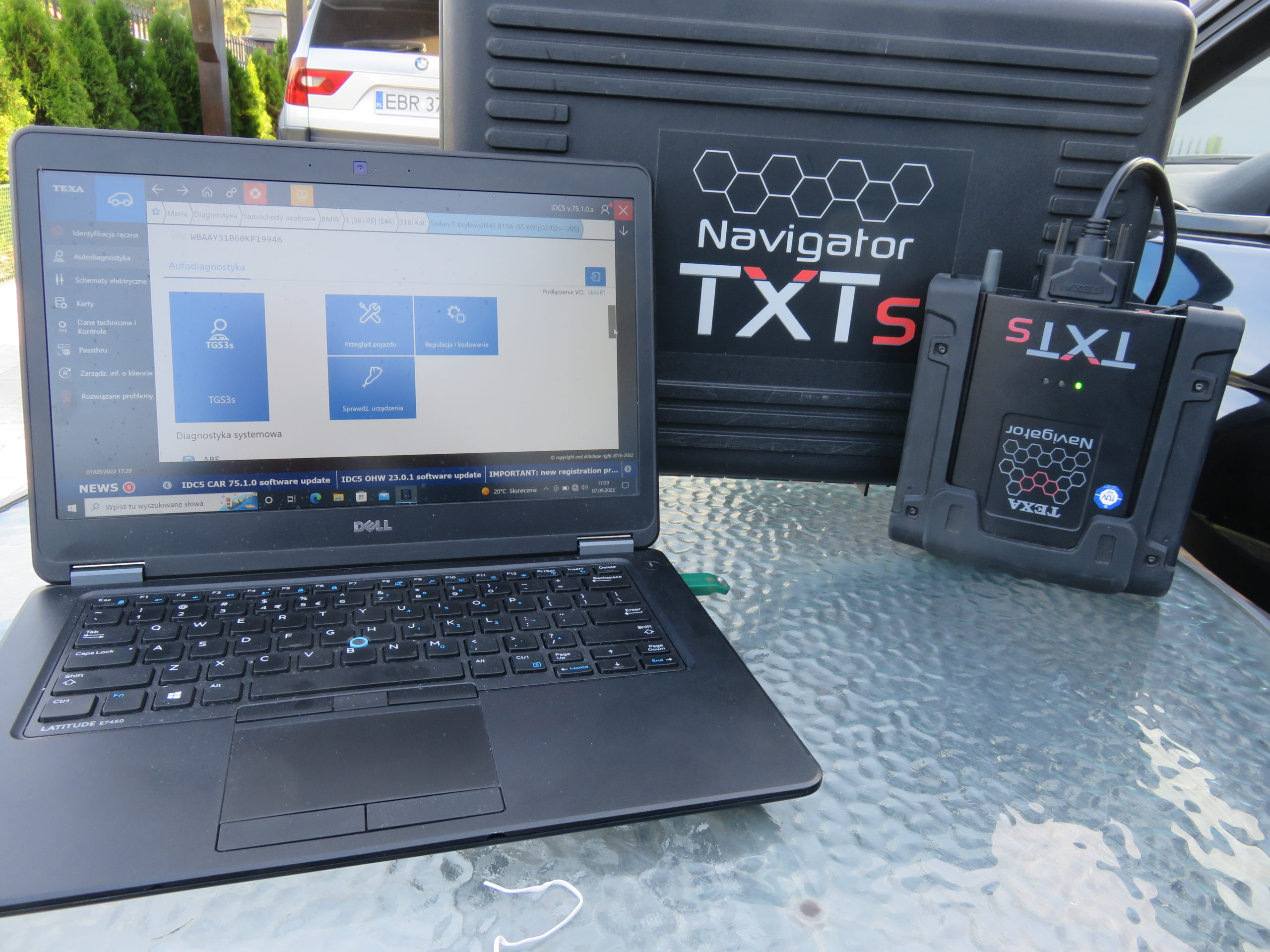
Odczyt danych z CAN dotyczących m.in. procesu hamowania wykonanego przez samochód osobowy marki Volkswagen Passat ALLTRACK pozwolił na prawidłowe ustalenie położenia samochodu w momencie pierwszego zderzenia oraz na odmienne wnioski opinii.
Poniżej niektóre dane (Volkswagen PASSAT):
| Velocity_vehicle_reference: | 3.26 m/s |
| Longitudinal_acceleration_vehicle_reference: | -1.58 m/s˛ |
| Velocity_vehicle_reference: | 6.73 m/s |
| Longitudinal_acceleration_vehicle_reference: | -9.51 m/s˛ |
| Velocity_vehicle_reference: | 4.07 m/s |
| Longitudinal_acceleration_vehicle_reference: | -11.66 m/s˛ |
| Velocity_vehicle_reference: | 8.18 m/s |
| Longitudinal_acceleration_vehicle_reference: | 0.57 m/s˛ |
| Velocity_vehicle_reference: | 3.30 m/s |
| Longitudinal_acceleration_vehicle_reference: | -1.49 m/s˛ |
| Velocity_vehicle_reference: | 0.00 m/s |
| Longitudinal_acceleration_vehicle_reference: | 0.00 m/s˛ |
| Velocity_vehicle_reference: | 3.39 m/s |
| Longitudinal_acceleration_vehicle_reference: | -5.16 m/s˛ |
Fachowy odczyt danych z elektroniki samochodu EDR, CAN, CAN FD pozwala na ustalenie czy dane zdarzenie przebiegało w sposób podany przez uczestników zdarzenia.
W przypadku samochodów ciężarowych, autobusów, przyczep, naczep istotne dane ruchowe są zapisywane w ODR, ECU oraz dane zapisane w zamrożonych ramkach systemu CAN. Odczytuję również dane ze sterowników, które uległy mechanicznemu uszkodzeniu.
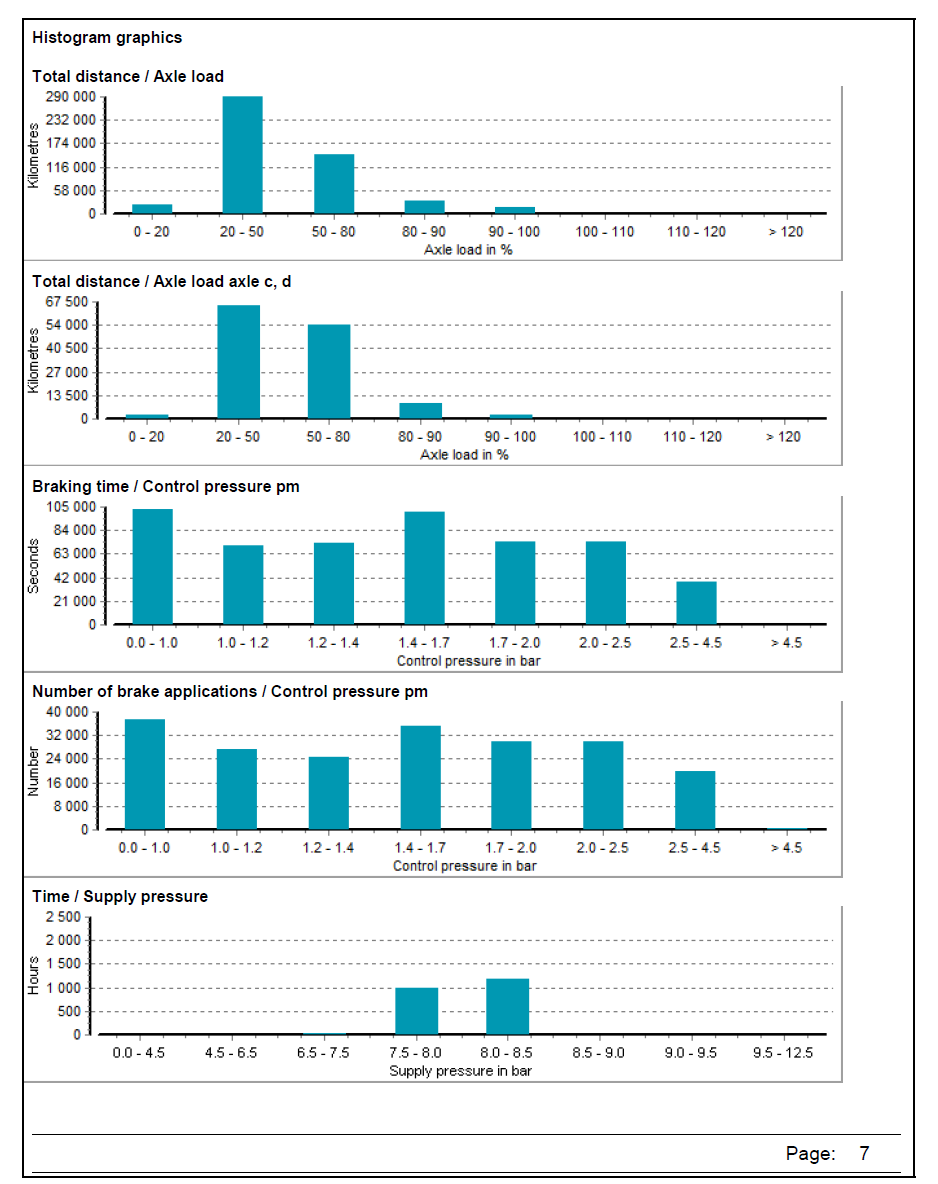
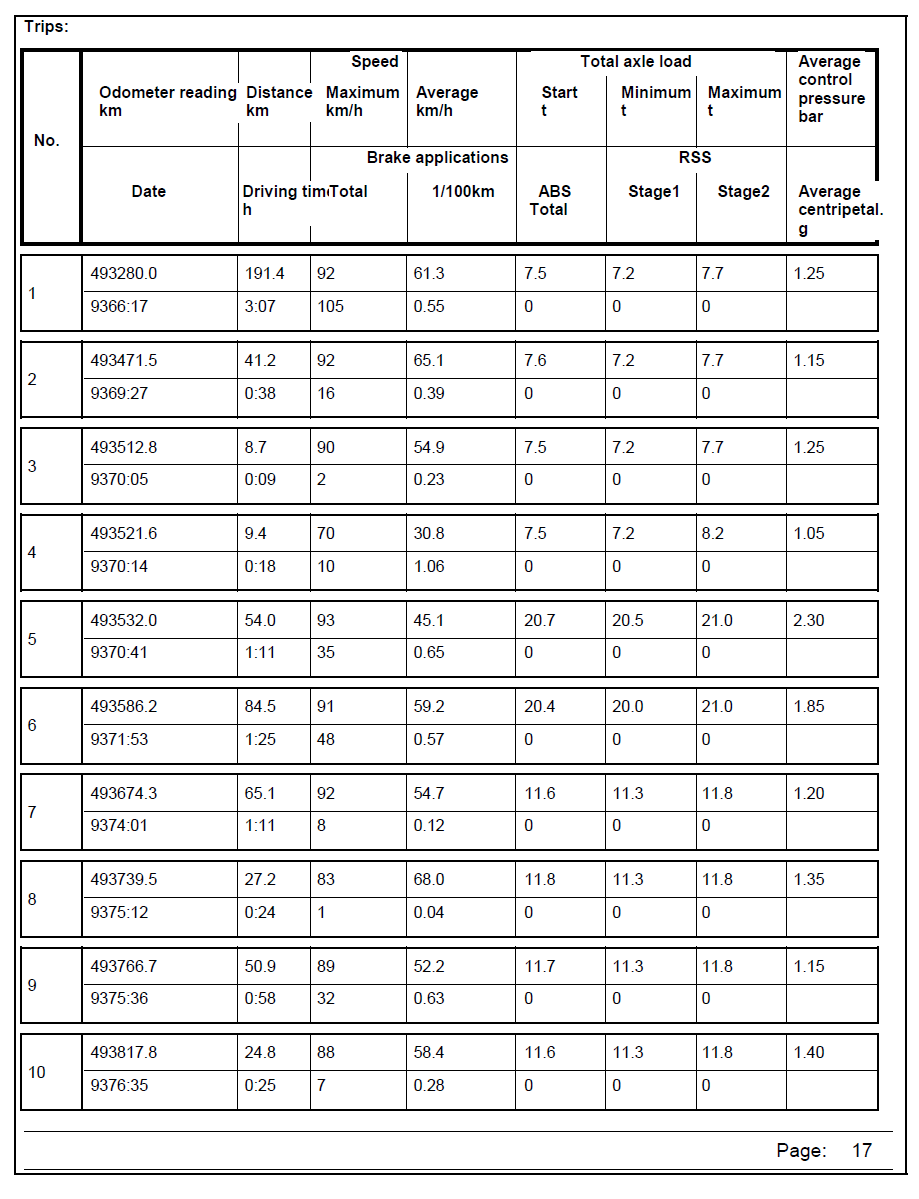
Do powypadkowego badania układów hamulcowych naczep, przyczep, ciężarówek, autobusów używam specjalistycznego urządzenia (konstrukcja mojego Biura), które pozwala mi za pomocą fachowego oprogramowania oraz specjalistycznych interfejsów na odczyt danych z elektroniki ODR, ECU, ustalenie stanu faktycznego, w tym oświetlenia – zarówno w chwili wypadku, jak również przed wypadkiem.

Poniżej część danych z ODR z systemu WABCO. Z uwagi na zbyt dużą ilość danych nie podaję pełnego raportu.

Dane z tachografów cyfrowych
W tym przypadku dane dotyczące wymiaru ogumienia podczas legalizacji są zapisane w pamięci masowej zapisu danych tachografu. Wiarygodność zapisu tachografu cyfrowego – nie zawsze podawana wartość prędkości jest faktyczną wartością prędkości i aby to sprawdzić należy wykonać szereg analiz, ale podstawową jest odczyt ze sterownika danych ECU, ponieważ istotą jest wiarygodność danych przesyłanych do tachografu cyfrowego. Kolejną sprawą jest fakt, że jest to zapis do bufora czasu, a nie na bieżąco. Dlatego tak istotną sprawą powinny zajmować się osoby posiadające wymaganą wiedzę, sprzęt, oprogramowanie niezbędne do tego typu analiz, a nie tylko i wyłącznie uprawnienia. Poniżej przykład sytuacji, że podawanej wartości prędkości w chwili zderzenia nie możemy uznać za wiarygodną, zwłaszcza, jeżeli wykres prędkości wygląda jak poniżej.
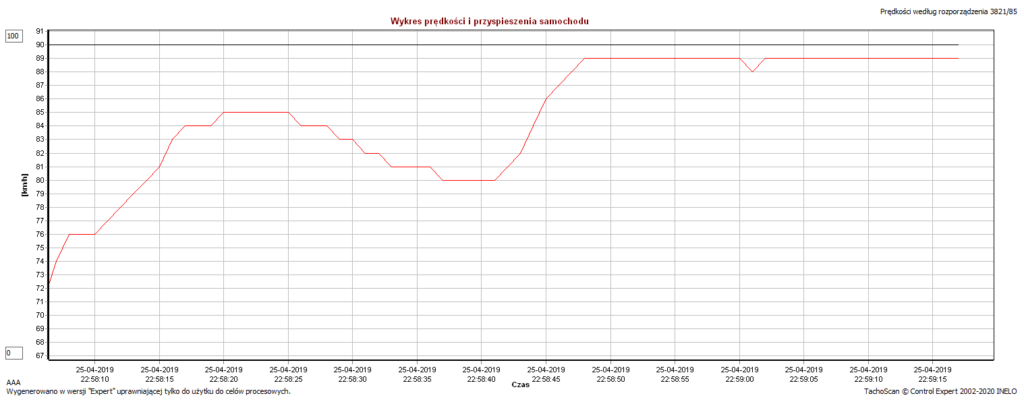
W tym przypadku istotną informacją, że podawana prędkość bezpośrednio przed zderzeniem, a szczególnie w momencie zderzenia jest niewiarygodna wynikała z konfiguracji miejsca zderzenia oraz nagrania wideo, które obrazuje sposób ruchu zespołu względem podwójnej linii ciągłej na tak złożonej konfiguracji drogi.

Kierujący ciągnikiem siodłowym marki Scania R440 z naczepą marki Krone poruszał się tak jak ciągnik siodłowy z naczepą widoczny na fotografii. Z analizy filmu znajdującego się w aktach sprawy wynika, że zarówno ruch ciągnika marki Scania R440, jak również naczepy marki Krone przed zderzeniem jest stabilny, brak bocznych znoszeń, przechyłów, zarzucania itp.

Podczas wyjazdu ciągnika siodłowego marki Scania R440 z naczepą marki Krone z „szykany” doszło do zderzenia z ciągnikiem siodłowym Volvo FH12 z naczepą cysterną LAG, a praktycznie to głównie z naczepą.

Ten materiał ma istotne znaczenie, ponieważ z doświadczenia przeprowadzenia tego typu dynamicznych symulacji wynika, że przy tej konfiguracji przestrzennej drogi taki typu ruchu ciągnika siodłowego marki Scania R440 z naczepą marki Krone z uwagi na jego dynamikę jest technicznie niemożliwy dla przyjmowanej w aktach sprawy (zapis tachografu) prędkości na tym odcinku drogi. Można to udowodnić, przeprowadzając symulację dynamiczną powyższego zdarzenia za pomocą programu symulacyjnego PC Crash w wersji 14.0. W tym przypadku konfiguracja drogi oraz materiał dowodowy pozwalał na jednoznaczne wnioski, że przyjmowane wartości prędkości z zapisu tachografu cyfrowego zarówno w momencie zdarzenia, jak również bezpośrednio przed zderzeniem dla ciągnika siodłowego marki Scania R440 z naczepą marki Krone są nieprawdziwe i zaprzeczają elementarnym prawom fizyki. Elementarnym wymogiem tego typu zapisu jak również wszystkich tego typu danych jest weryfikacja ich wiarygodności. W tym przypadku sprawa była niezmiernie prosta, ponieważ na taką jednoznaczną weryfikację pozwala rzeczowy materiał dowodowy zawarty w aktach sprawy, wystarczy jedynie fachowa rekonstrukcja dynamiczna zgodna z wymogami prawa. Z elementarnej wiedzy wiadomo, że prawidłowość wskazań zapisów tachografu zależy od:
- sprawności elementu wykonawczego, który przekazuje impuls do tachografu cyfrowego,
- faktu czy dysponujemy pełnym zapisem, ponieważ każdy tachograf najpierw dane gromadzi w buforze, a następnie dopiero je rejestruje i w chwili wypadku może się tak zdarzyć, że nawet 30 sec ostatniego ruchu nie zostanie zapisanych.
Wykonałem odczyt ze sterownika odpowiedzialnego za przekaz i prawidłowość impuls pracy tachografu cyfrowego. Raport z badania poniżej. Z przeprowadzonego badania – dane z ECU wynika, że nastąpiła awaria układu odpowiedzialnego za prawidłową pracę tachografu cyfrowego.

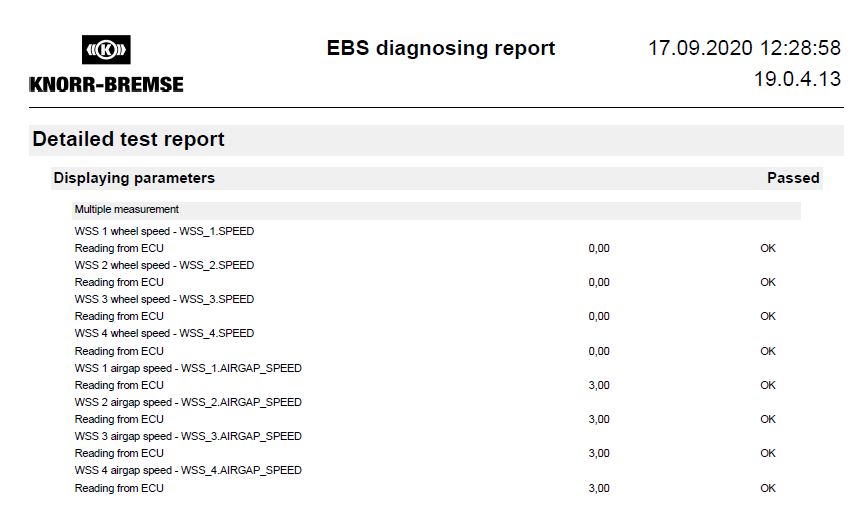
Kolejnym źródłem informacji również w tym przypadku są dane ODR zapisywane przez sterownik naczepy, przyczepy itp.